|
Enviado por : Heber Rizzo 2005-07-04 18:21:00 Deep Impact: el impactor y su último viaje
Algunas imágenes y datos sobre el módulo impactor y sus correcciones finales de navegación
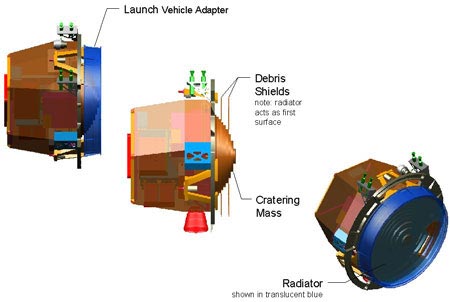
El impactor estuvo mecánica y eléctricamente adosado a la nave nodriza durante todo el viaje, excepto las últimas 24 horas de la misión. Solamente durante ese día final, el impactor funcionó con energía de sus baterías internas. El sistema de propulsión utilizó hidracina, que le pudo proporcionar hasta 25 m/s de delta-V para buscar su blanco.
El impactor se separó de la nave nodriza 24 horas antes de su choque con el núcleo del cometa Tempel 1. El impacto generó 19 gigajoules (el equivalente a 4,8 toneladas de TNT) para excavar el cráter. Esta energía cinética se generó por la combinación de la masa del impactor (370 kilogramos) y de su velocidad en el momento del choque (aproximadamente 10,2 kilómetros por segundo). El proceso de búsqueda de blanco y de impacto representó todo un reto, ya que era necesario apuntar a su destino que se encontraba a unos 860 000 kilómetros y debía acertar en un área de menos de 6 kilómetros de diámetro. Para lograrlo, utilizó un rastreador estelar de alta precisión, el Sensor de Blancos del Impactor (ITS = Impactor Target Sensor) y algoritmos de navegación desarrollados por el Laboratorio de Propulsión a Chorro para guiarlo hasta su destino. Disponía de un pequeńo sistema de propulsión de hidracina para sus correcciones de trayectoria y control de altitud.
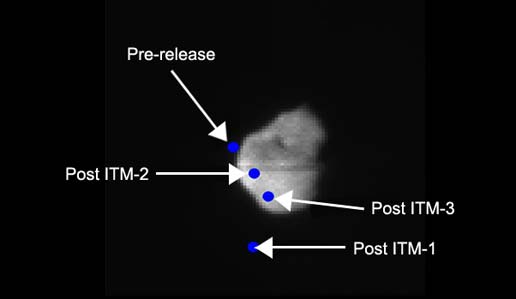
Esta imagen muestra la forma en que el módulo impactor de Deep Impact hizo blanco sobre el cometa Tempel 1 a medida que realizaba su aproximación final en las primeras horas del día 4 de julio de 2005. El sistema autónomo de navegación de la sonda fue diseńado para realizar hasta tres maniobras de ajuste de blanco, identificadas en esta imagen con las letras ITM, para corregir su curso hacia el cometa. El punto superior izquierdo (Pre-release) indica que la sonda hubiera errado al núcleo del cometa si no se hubieran realizado las maniobras. El punto debajo del núcleo (Post ITM-1) muestra por dónde hubiera pasado la sonda si únicamente se hubiera realizado la primera maniobra. El punto que está más a la izquierda sobre el núcleo (Post ITM-2) indica el lugar en el que hubiera impactado la sonda si solamente se hubieran realizado las dos primeras maniobras. El punto inferior sobre el núcleo (Post ITM-3) muestra el sitio en el que, después de que se hubo llevado a cabo la tercera maniobra de corrección de rumbo, la sonda encontró su recompensa final y chocó con el cometa. Heber Rizzo Baladán | ||||||
|
(c)2002-2006 Astroseti.org Los contenidos pueden utilizarse siempre que se mencione la fuente y se enlace al artículo en nuestro servidor. Para usos comerciales es necesario solicitar autorización. |