Resumen: Un concepto para la robótica adaptable ha sido demostrado por lo que los especialistas llaman “robots de enrejado” –conectores mecįnicos que unen muchas partes móviles para cambiar su forma en respuesta a los cambios de su ambiente.
Basado en un informe del Colegio Dartmouth
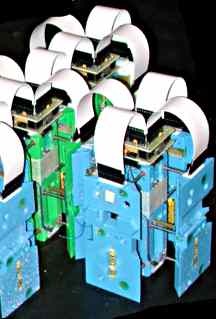
Forma del prototipo que cambia componentes bįsicos. Crédito de Imagen: Dartmouth
|
Esto comenzó con pelotas de tenis. Como un antiguo jugador colegiado de tenis, Daniela Rus habitualmente hace girar y rodar dos pelotas de tenis en su mano cuando pasea en su oficina. Como un investigador de robótica en el Colegio Dartmouth, ella se preguntó por qué las pelotas de tenis no eran capaces de girar una alrededor de la otra por si mismas.
Ella pronto determinó que los electroimanes no tenķan bastante capacidad de carga para solucionar el problema de pelota de tenis. Sin embargo, su pregunta condujo a un programa de investigación de diez ańos sobre los desafķos de diseńar los robots que se configuran de nuevo para realizar tareas diferentes. Recientemente, Rus e investigadores de Laboratorio Dartmouth De robótica desarrollaron los primeros métodos de control que garantizan que tales robots auto-re-configurables no se desharįn en piezas cuando ellos cambien de forma o se muevan a través de una superficie.
El artķculo del investigador posdoctoral Zach Butler, el estudiante graduado Keith Butler, Rus y el profesor visitante Kohji Tomita del Instituto Nacional del Japón de la Ciencia Avanzada Industrial y la Tecnologķa apareció en la edición de septiembre de 2004 del Diario Internacional de Investigación De robótica (IJRR).
'Estos śltimos documentos muestran es posible desarrollar capacidades de auto-reconfiguración en un camino que tiene garantķas analķticas', dijo Rus, quien se trasladó al MIT en enero después de 10 ańos como el director del Laboratorio De robótica de Dartmouth. 'Entender exactamente como trabaja su sistema y cuando usted puede confiar y cuando no es muy importante'. En 2002, Rus recibió un MacArthur Foundation Fellowship , un supuesto 'premio de genio', por su trabajo, que ha sido apoyado por la Fundación de Ciencia Nacional (NSF) conferido desde 1996.
Los robots por lo general son diseńados para realizar una tarea muy bien, como ensamblar piezas en una fįbrica o hacer el vacķo en la sala de estar. Pero pida a aquellos robots que realicen otra tarea o hasta la misma tarea en un ambiente nuevo, y se estarį metiendo en problemas.
La interpretación generada por ordenador de la misión semiautónoma planea ahora tomar lugar con la utilización de los rover gemelos Marcianos, el Espirit y el Opportunity .Crédito: Maas/NASA/JPL
|
Los Robots auto-re-configurables, de otra parte, pueden volver a reformarse a si mismos para su tarea o en cambios de ambiente, idealmente sin la intervención humana. Un robot caminante usado para operaciones de bśsqueda y rescate se transformarķa en algo parecido a una serpiente para deslizarse por pequeńos espacios en un edificio derrumbado. Un robot rodante que explora la superficie de Marte fluirķa como el agua sobre una bajada vertical o fluirķa cuesta arriba por una repisa de roca.
Sin embargo, los śltimos avances a dķa de hoy en robots que cambian de forma nos deja un largo camino para cumplir con esa visión. Varios grupos de investigación en el mundo entero abordan los tan significativos desafķos mecįnicos y de control que envuelven a un robot que cambia de forma..
A lo largo de la década pasada, asistida por mįs de 50 estudiantes y estudiantes de graduado de Dartmouth que pasan por su laboratorio, Rus ha hecho avances sobre ambos frentes mecįnico y de control. Sobre el lado mecįnico, ella promovió el diseńo de robots 3-D que cambian forma construidos ' de cubos que se amplķan, ' como los módulos de Cristal.
Cada módulo de Cristal, 'įtomo', tienen lados que se amplķan contraen y ese mecanismo de 'llave-cerradura' para atar a įtomos sus vecinos. El concepto cubo- expansionable es un ejemplo del llamado ' robots de enrejado', los cuales pueden asumir una amplia variedad de formas 3-D, una ventaja sobre robots cuyos módulos sólo pueden formar cadenas largas, delgadas(finas).
Ayudante Robótico para Actividad Extra Vehicular (ERA)
Crédito rover: JPL/NASA Robótica
|
El cambio-de-forma para tales robots de enrejado se reduce a ejercicios en el control y la planificación, que pasa por dos niveles. En un nivel, el robot debe planear como remodelarse a si mismo para pasar de la forma A a la forma B. En otro nivel, el robot también debe planear la serie de formas necesarias para lograr tareas mįs complicadas, como el movimiento sobre el terreno įspero.
El trabajo previo en robots de autoreconfiguración usó métodos centralizados de controlar como los pedazos se reensamblaron entre sķ. Hoy, los investigadores en el campo generalmente reconocen la necesidad de métodos distribuidos, en los que cada módulo robótico toma al menos algśn control de su propio destino.
'Desde que hablamos de sistemas potencialmente muy grandes, con miles de partes individuales, es importante considerar el control distribuido y la planificación, ' dijo Rus'. Y algoritmos paralelos y distribuidos son difķciles de garantizar. '
El reciente documento del IJRR y un documento relacionado en septiembre de 2003 de IJRR por Butler y Rus proporcionan algunos primeros métodos distribuidos para generar probables pasos correctos para ambos tipos de control y de planificación. En otras palabras, los robots que se configuran de nuevo usando estos proyectos no se caerįn a pedazos, en un sentido muy literal, o permanecerįn irreversiblemente atrascados en su deambular.
Los documentos presentan juegos de aproximadamente una docena de reglas que instruyen a robots de enrejado como vagar sobre el terreno, construir altas estructuras para vencer obstįculos o entrar en espacios cerrados por pequeńos tśneles. Rus y sus colegas analizaron los juegos de reglas mįs simples para la corrección y desarrollaron métodos automatizados para demostrar que las mįs complicadas funcionan. Tareas mįs complejas, sin embargo, exigen juegos de reglas mįs complicados, y Rus ahora investiga las vķas que permitirķan a robots aprender sus propias reglas.
Ademįs de las garantķas teóricas, los documentos representan una salida de otra norma. A menudo en la robótica, un método de control estį unido a un hardware
especķfico, haciéndo mįs difķcil aplicar lecciones de un sistema robótico a otro. El trabajo de Rus se aplica al control y planificación de la clase entera de robots de enrejado, de los que cada uno de los įtomos de Cristal es un ejemplo.
'El documento [śltimo IJRR] es un ejemplo de una metodologķa para desarrollar y demostrar algoritmos y entender sistemas de control en general, ' dijo Rus. ' Es importante aprender mįs lecciones generales. Se consigue un sentido mįs profundo sobre el problema de autoreconfiguración”.
