
|
|
Astroseti.org : El Universo a tu alcance Astronomía, Astrobiología, Astrofísica, Astronáutica, SETI y Ciencia en general. |
Te queda mucho por verAstroseti es mucho más que un simple portal de noticias.Por ejemplo traducimos artículos de la misión Cassini-Huygens, que nos está dando una nueva visión de Saturno y sus lunas. |
 Pulse aquí para mostrar columna de noticias
Pulse aquí para mostrar columna de noticias |
|
Enviado por : Liberto Brun Compte 2004-12-07 08:30:00 Astronautas de ESA bajo el agua para probar el Brazo Robot Europeo
3 Diciembre 2004.
El modelo WET, del Brazo Robot Europeo (ERA) fue inspeccionado a fondo y probado en el Centro Gagarin de entrenamiento de Cosmonautas cerca de Moscú la semana pasada. 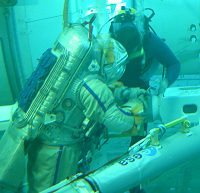 El astronauta de la ESA, André Kuipers se puso un traje espacial Ruso de Orlán para la ocasión. El astronauta de la ESA, André Kuipers se puso un traje espacial Ruso de Orlán para la ocasión.
Pasó más de tres horas bajo el agua con el modelo del brazo robótico, que se construyó en 1998, pero que aún así se encuentra en perfectas condiciones. Impresionante Este impresionante brazo robotizado tiene más de 11 metros de longitud y pesa 630 kilos. Cuando el ERA llegue a la Estación Espacial Internacional (ISS), el Módulo del Laboratorio de Multiprocesos Ruso (MLM) se convertirá en su base permanente. Con la ayuda de 7 juntas, una variedad de herramientas y su electrónica, el ayudante de los astronautas podrá moverse como un insecto alrededor de los segmentos rusos de la ISS y se utilizará para una gran variedad de tareas.  El director del proyecto del ERA de la ESA, Philippe Schoonejans dijo: "ERA puede trabajar con la esclusa de aire Rusa, lo que significa que los astronautas ya no tendrán que aventurarse fuera de la Estación Espacial para instalar ciertas piezas de hardware. Usando video cámaras, el brazo puede realizar inspecciones de la parte exterior de la Estación, puede mover los experimentos y las provisiones y hasta servir de grúa para los astronautas". El director del proyecto del ERA de la ESA, Philippe Schoonejans dijo: "ERA puede trabajar con la esclusa de aire Rusa, lo que significa que los astronautas ya no tendrán que aventurarse fuera de la Estación Espacial para instalar ciertas piezas de hardware. Usando video cámaras, el brazo puede realizar inspecciones de la parte exterior de la Estación, puede mover los experimentos y las provisiones y hasta servir de grúa para los astronautas".
Kuipers probó el Modelo de Pruebas Ingrávido de ERA , conocido como el "modelo WET". Este modelo se construyó en 1998 por un consorcio de compańías encabezadas por la Dutch Space, holandesa. Originalmente la ERA habría sido lanzada en el Trasbordador Espacial en el 2001, pero debido a las circunstancias el lanzamiento ha sido pospuesto. El pasado verano fue decidido que se lanzase en Noviembre del 2007 a bordo de un cohete Protón Ruso conjuntamente con el MLM.  Trabajo duro Trabajo duro
Pero antes de eso, hay aún mucho trabajo por hacer. La semana pasada, en un ejercicio bajo el agua, encabezado por Kuipers, el modelo WET fue desmantelado y vuelto a ensamblar. Junto con el ruso Dmitry Verba, Kuipers también revisó los controles manuales, que sirven de reemplazo/apoyo para el sistema automático. De acuerdo con el astronauta holandés, "el ejercicio fue muy pesado y requirió de mucha paciencia. Tuvimos que realizar gran cantidad de movimientos de rotación durante los controles manuales del brazo; una tarea nada fácil debajo del agua". El brazo funcionó de maravilla. Aunque Schoonejans concluyó que se requieren algunas mejoras. Algunas operaciones a una mano tuvieron que ser efectuadas por Kuipers utilizando ambas, o con la ayuda de Verba, ya que el astronauta no tenía manera de estabilizarse por sí mismo. Una posible solución para esto sería utilizar un mecanismo móvil de unión. También se tendrá que modificar un juego de arandelas , ya que se salían mientras se apretaban los tornillos, haciendo perder un tiempo muy valioso. El material de aislamiento, que a veces obstruía las video cámaras, tendrá que asegurarse de una forma mejor. 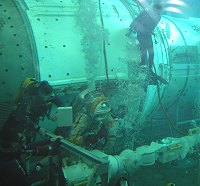 Perfección Perfección
El ańo próximo, la compańia Rusa - Energia - así como los socios Europeos que construyeron ERA, trabajarán para perfeccionar el brazo robótico. Desde mediados del 2006, cuando se encuentren ya listos los nuevos procedimientos, las futuras expediciones de tripulantes a la ISS serán entrenadas por vez primera. Se familiarizarán con ERA antes de su lanzamiento en el 2007. Glosario de abreviaturas utilizado en este artículo: WET = Weightless Environmental Test (Prueba Ambiental de Ingravidez) ERA = European Robotic Arm (Brazo Robótico Europeo) MLM = Multipurpose Laboratory Module (Módulo de Laboratorio de Multiprocesos) ESA = European Space Agency (Agencia Espacial Europea) ISS = International Space Station (Estación Espacial Internacional) Artículo de: ESA 3 Diciembre 2004 Traducción de: Liberto Para: Enlace: http://www.esa.int/export/esaCP/SEMG8LXJD1E_index_0.html |
Astroseti es una asociación sin ánimo de lucro formada por voluntarios que dedican su tiempo libre a la traducción de artículos con fines divulgativos.
Esta permitida la utilización de parte del contenido de nuestros artículos en otras páginas web siempre que se incluya enlace a la dirección original en Astroseti. Si desea utilizar el texto completo de uno de nuestros contenidos deberá solicitar autorización.